Ejemplo de control en un tanque¶
Tomando la ecuación diferencial para un tanque con una entrada de caudal y un salida de caudal atmosferica, siendo:
$$A\,\frac{d}{dt}h(t) = q_{in}(t)- \frac{h(t)}{R}$$
donde $A$ es el area del tanque (suposición de que el area es constante), $R$ es la resistencia hidráulica, una constante que aparece despues de linealizar la ecuación. $h(t)$ es la altura del tanque y $q_{in}(t)$ es el caudal de entrada.
Construyamos un controlador para este sistema.
Solución 1/6¶
Inicialmente llevemos la ecuación diferencial $A\,dh(t)/dt = q_{in}(t)- {h(t)}/{R}$ a la representación en espacio de estados:
$$\begin{align} \dot{x} &=& \begin{bmatrix}-\frac{1}{AR}\end{bmatrix} &\,x + \begin{bmatrix}\frac{1}{A}\end{bmatrix}\,u \\ y&=&\begin{bmatrix}1\end{bmatrix}&\,x \\ \end{align} $$
De aquí podremos llevar el sistema a un lazo cerrado:
$$\dot{x}=\left(A-BKC\right)\,x + B\,r$$

Solucion 3/6¶
Teniendo un controlador $K=[K_p]$, la matrix dinámica del sistema en lazo cerrado será:
$$A=\begin{bmatrix}-\frac{Kp}{A}-\frac{1}{AR}\end{bmatrix}$$
De aquí podemos ver que el sistema es estable para valores positivos de $K_p$, suponiendo todos los valores de los parámetros en $1$, la respuesta del sistema es:
plt.plot(t,y,[t[0],t[-1]],[1,1]);
plt.legend(["salida","referencia"])
plt.xlabel("tiempo");
plt.ylabel("amplitud");

Solución 4/6¶
Cómo pudimos observar la salida no llega a la referencia. Si pensamos en el control $PID$, en este momento tenemos un controlador tipo $P$. Para agregar un controlador $PI$ deberemos agregar un tercer lazo cerrado (el segundo lazo de control) al sistema:
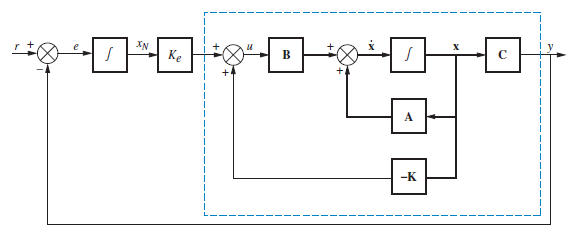
La representación en espacio de estados será:
$$\begin{align} \begin{bmatrix} \dot{x}\\ \dot{x_N} \end{bmatrix}&= \begin{bmatrix} (A-BK) & B\,K_e \\ -C & 0 \end{bmatrix} \,\begin{bmatrix} x\\ x_N \end{bmatrix}+ \begin{bmatrix} 0\\ 1 \end{bmatrix} \,r \\ y&= \begin{bmatrix} C & 0 \end{bmatrix} \,\begin{bmatrix} x\\ x_N \end{bmatrix} \end{align}$$
Solución 5/6¶
Remplazando los valores en la ecuación, tendremos (con $K_e=1$):
Ke = 1
mKe = np.array([[Ke]])
nA = np.stack((np.stack((mA,mB*mKe),axis=2),np.stack((-mC,np.array([[0]])),axis=2)))
nB = np.array([[0],[1]])
nC = np.stack((mC,np.array([[0]])),axis=2)
nA = nA.reshape((2,2))
nC = nC.reshape((1,2))
sys = ct.ss(nA,nB,nC,mD)
display(sys)
Esta notación incluye las matrices $A$, $B$, $C$ y $D$.
Solución 6/6¶
Haciendo la simulación del sistema en lazo cerrado con lazo de integración, la respuesta temporal será:
plt.plot(t,y,[t[0],t[-1]],[1,1]);
plt.legend(["salida","referencia"])
plt.xlabel("tiempo");
plt.ylabel("amplitud");

Los valores propios de la matriz $A$ son: $-1$ con multiplicidad $2$
Posicionamiento de polos¶
Tomando de manera teórica los valores del sistema en lazo cerrado tendremos la matrix dinámica del sistema
Ke,l = symbols("K_e,\\lambda")
MKE = Matrix([[Ke]])
NA = Matrix([[MA-MB*MK,MB*MKE],[-MC,Matrix([[0]])]])
display(NA)
Podemos calcular la ecuación carasterística:
EC = Poly((l*eye(2) - NA).det(),l)
display(EC)
Podemos igualar con el polinomio generado por dos polos:
p1,p2 = symbols("p_1,p_2")
poles2 = Poly((l-p1)*(l-p2),l)
display(poles2)
Posicionamiento de polos (continuación)¶
Igualando los coeficientes:
C1 = poles2.coeffs()
C2 = EC.coeffs()
eq1 = Eq(C1[1],C2[1])
eq2 = Eq(C1[2],C2[2])
display(eq1,eq2)
Resolviendo
sols = solve({eq1,eq2},{Kp,Ke})
display(sols)
Posicionamiento de polos (continuación)¶
Si deseamos ubicar los polos del sistema en $-5$ y $-30$, tendremos:
K1 = Eq(Kp,sols[Kp].subs({p1:-5,p2:-30}))
K2 = Eq(Ke,sols[Ke].subs({p1:-5,p2:-30}))
display(K1,K2)
suponiendo valores unitarios, tendremos:
display(K1.subs({A:1,R:1}))
display(K2.subs({A:1,R:1}))
Posicionamiento de polos (continuación)¶
La respuesta temporal para el sistema en lazo cerrado será:
nAe = np.array(NA.subs({Kp:34,Ke:150,A:1,R:1})).astype(np.float64)
sys = ct.ss(nAe,nB,nC,mD)
t,y = ct.step_response(sys)
display(sys)
plt.plot(t,y,[t[0],t[-1]],[1,1]);
plt.legend(["salida","referencia"])
plt.xlabel("tiempo");
plt.ylabel("amplitud");

Ejercicios¶
Considerando la siguiente representación en espacio de estados:
$$\begin{align} \dot{x}&= \begin{bmatrix} 0 & 1 \\ -3 & -5 \end{bmatrix} \,x+ \begin{bmatrix} 0\\ 1 \end{bmatrix} \,u \\ y&= \begin{bmatrix} 1 & 0 \end{bmatrix} \,x \end{align}$$
- Diseñar un controlador sin control integral que genere un sobre pico del $10\%$ y un tiempo de establecimiento de $0.5$ segundos. Evaluar el error en estado estacionario para un escalón unitario.
- Repita el diseño del controlador incluyendo el control integral. Evaluar el error en estado estacionario para un escalón unitario.
Sobre el sobre-pico¶
El sobre pico se puede definir en función de coeficiente de amortigüamiento $\xi$, de la siguiente forma:
$$S_p = e^{-\frac{\pi \xi}{\sqrt{1-\xi^2}}}$$
donde $S_p$ es el sobrepico expresado en decimal luego,
sp,xi = symbols("S_p,\\xi")
display(Eq(xi,solve(Eq(sp,exp(-pi*xi/sqrt(1-xi**2))),xi)[0]))
Relación entre el amortiguamiento y los polos¶
Existe una relación entre el amortiguamiento y el valor de los polos, se puede ver en la siguiente gráfica

Referencias¶
Nise, Norman S. Sección 12. Control systems engineering (7th Ed).